Undergraduate Research
Mar 2020 – May 2022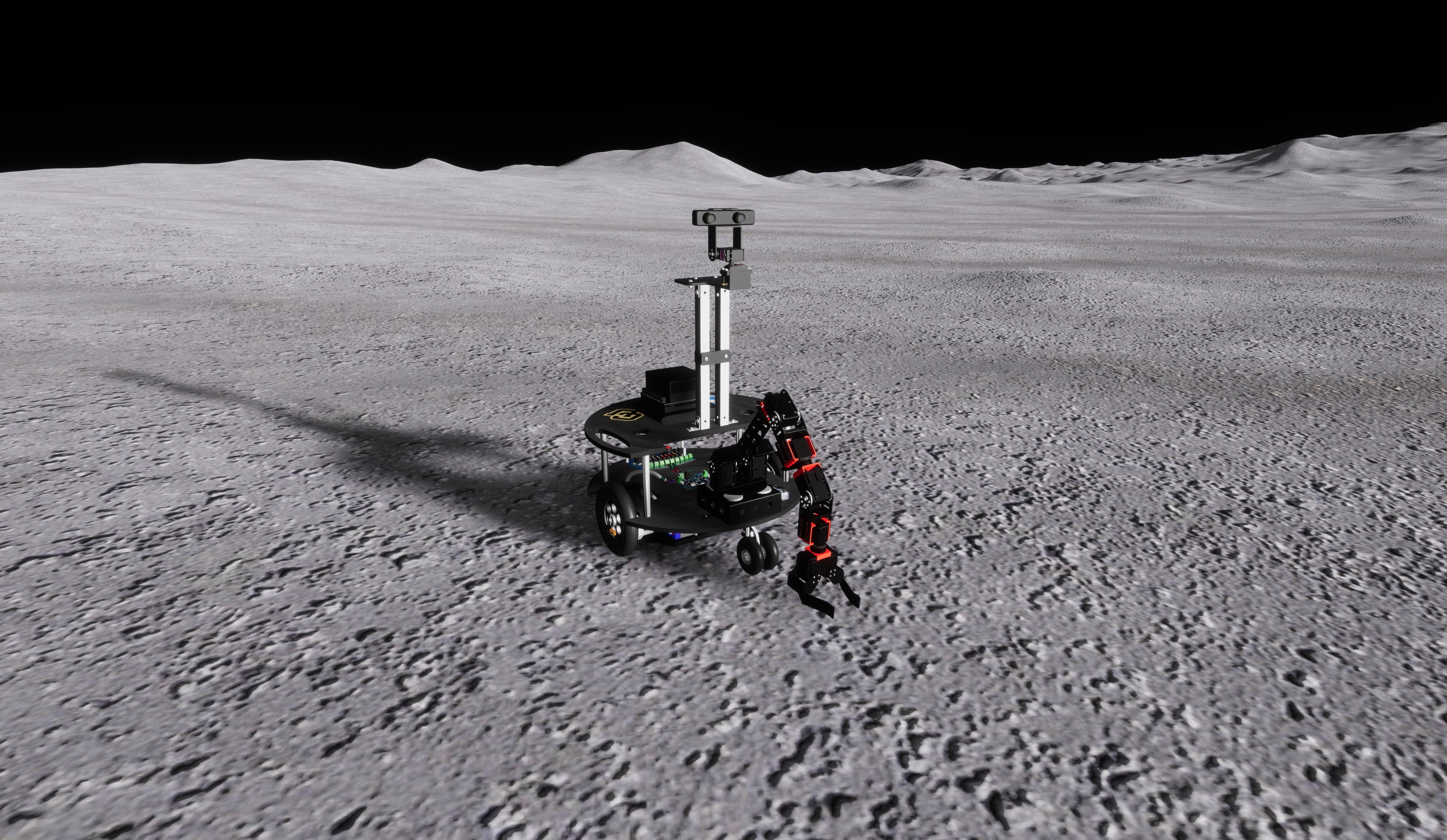
Digital Armstrong rover twin in lunar environment.

Physical Armstrong rover in lab hallway.
NASA will return to the Moon to conduct lunar and space science as well as prepare for human exploration missions. NASA’s current rover failure response methods use hardware duplicates which are costly and time consuming to assemble. To address this, we developed and assessed a VR digital rover twin in a simulated environment using novel technologies to support lunar robotic missions like FARSIDE in case of assembly failures.
Work supported by NASA-funded NESS and the NASA Solar System Exploration Research Virtual Institute.